Tool Module: The Hand
| The human hand, a late product
of evolution, represents the pinnacle of fine movement and co-ordination. Australopithecus,
human ancestors who lived 4 million years ago, could not oppose their thumbs to
their forefingers, just as chimpanzees cannot do so today. Only in Homo sapiens
has the thumb become longer and opposable to all the other fingers, enabling us
to grasp smaller objects even more precisely. Data obtained from fossil hands
indicate that this precise grasping ability first developed in the human species
Homo erectus about 1.8 million years ago. |  Study of Hands Nicolas de Largillière (1656-1746) |
By analyzing films of
many movements, researchers have been able to characterize the major steps in
the action of picking up an object. Depending on the subject and the circumstances,
the movement of the hand toward the object takes 400 to 800 milliseconds (ms).
It begins with a rapid acceleration that peaks at about 150 ms and produces the
maximum velocity 100 ms later. A deceleration peak then occurs, followed by a
phase of low, declining velocity, until the hand stops near the object. The strong
initial acceleration enables the hand to cover most of the distance rapidly (the
hand spends nearly half of the total movement time in the immediate vicinity of
the object).
The process of actually grasping the object is highly complex,
because it involves many degrees of freedom: whether the fingers are flexed or
extended, the position of each of the phalanges, the distance between the fingers,
the amount that the thumb must rotate to achieve opposition, and so on. Note that
during the approach movement, the fingers spread apart until they reach a maximum
span that is wider than the object. Then they reverse this movement and close
on the object gradually.
After this "visual" phase, a "tactile"
phase ensues. Actually, this tactile phase begins even slightly before the fingers
make contact with the object. The force with which they grasp it is calculated
according to the object's weight and expected texture. For example, the fingers
will apply more force to a smooth object than to a rough one. The pressure that
the hand exerts on an object when it makes contact is therefore determined from
visual indications that evoke past knowledge of this object or similar ones that
is stored in memory.
The ascending force used to pick the object up is
not applied until about 100 ms after contact. If the weight of the object is increased
while it is being grasped (for example, if someone pours water into a glass while
someone else is lifting it), the grasping force and the lifting force will increase
synchronously in response to tactile signals transmitted by cutaneous receptors
in the finger pads.
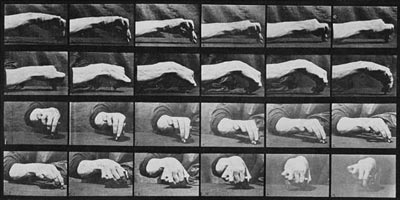
Movement of the hand, drawing a circle
(1887)
Eadweard Muybridge (1830-1904)
Most researchers
who have studied this complexly co-ordinated process that lets us pick up objects
without dropping them agree on the following general facts:
- The actions
of moving the arm and preparing the hand to pick up the object start together:
the fingers start to open as soon as the arm starts accelerating.
- The
halt in the arm's movement is not triggered by contact with the object but is
instead pre-programmed; by the time the hand makes contact with the object, the
arm's velocity is close to zero.
- The fingers begin to close on the
object at the start of the low-velocity phase of the arm movement.
![]()